
Articles
- Page Path
- HOME > GEO DATA > Volume 5(3); 2023 > Article
-
Original Paper
드론 다분광영상을 활용한 하천 수심조사 연구 -
권영화1
 , 김동수2,*, 권시윤3
, 김동수2,*, 권시윤3 - Riverine Bathymetry Survey Using Unmanned Aerial Vehicle-Based Multispectral Image
-
Yeonghwa Gwon1, Dongsu Kim2,*, Siyoon Kwon3
-
GEO DATA 2023;5(3):195-206.
DOI: https://doi.org/10.22761/GD.2023.0033
Published online: September 27, 2023
1박사수료생, 단국대학교 토목환경공학과, 경기도 용인시 수지구 죽전로 152, 16890, 대한민국
2교수, 단국대학교 토목환경공학과, 경기도 용인시 수지구 죽전로 152, 16890, 대한민국
3박사후연구원, 물환경센터, 토목건축환경공학과, 텍사스대학교-오스틴, 10100 Burnet Rd., Austin, 78758 TX, 미국
1Ph.D Candidate, Department of Civil and Environmental Engineering, Dankook University, 152 Jukjeon-ro, Sugi-gu, Yongin, 16890 Gyeonggi-do, South Korea
2Professor, Department of Civil and Environmental Engineering, Dankook University, 152 Jukjeon-ro, Sugi-gu, Yongin, 16890 Gyeonggi-do, South Korea
3Postdoctoral Researcher, Center for Water and Environment, Department of Civil, Architectural and Environmental Engineering, University of Texas at Austin, 10100 Burnet Rd., Austin, 78758 TX, USA
- Corresponding Author Dongsu Kim Tel: +82-31-8005-3611 E-mail: dongsu-kim@dankook.ac.kr
Copyright © 2023 GeoAI Data Society
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
- 527 Views
- 22 Download
Abstract
- River basin surveys are conducted with the aim of providing essential foundational information for the formulation of water management policies, as mandated by relevant laws and regulations. These surveys cover key investigation areas necessary for river basin management, including basic conditions, water conveyance, dimensions, environmental ecology, and more. Among the survey methods, the utilization of remote sensing data, such as drone monitoring imagery and satellite imagery, is employed for various purposes such as the safety management of hydraulic structures like dams and embankments, water quality monitoring, river terrain surveys, and assessments of changes in riverbeds. Recently, research in river basin studies has been conducted using hyperspectral imagery, which includes hundreds of spectral bands, in addition to standard RGB imagery. Hyperspectral imagery offers the advantage of high spectral resolution, making it suitable for multi-parameter assessments. However, it comes with the drawback of large initial data volumes and complex preprocessing requirements due to the abundance of spectral information. On the other hand, multispectral imagery, which collects spectral information from fewer than ten bands, is widely used, especially in agriculture and forestry. It allows for immediate monitoring of parameters like the normalized difference vegetation index (NDVI) using just two bands and facilitates the analysis of crop growth status and more. Research on bathymetric estimation using hyperspectral imagery has traditionally relied on the Optimal Band Ratio Analysis (OBRA), which utilizes band ratios highly correlated with depth to construct bathymetric maps. In this study, we applied the existing hyperspectral bathymetric estimation technique to multispectral imagery to assess the feasibility of bathymetric estimation using reduced spectral bands. We captured multispectral imagery and constructed bathymetric maps to evaluate the applicability of multispectral imagery in river basin applications. Furthermore, to overcome the limitations of traditional OBRA, we employed Gaussian mixture models for image clustering to improve the accuracy of bathymetric estimation.
- 하천의 수심은 하천 생태계의 물리적 구조와 역학을 분석하는 데 필수적이다(Dekker et al., 2011; Lee et al., 2022; Mallick et al., 2014). 특히, 수심 데이터는 하천의 흐름과 퇴적물 이송을 모델링하는 필수 요소이며, 이는 효과적인 수자원 관리와 홍수 예측에 중요하다(McKean et al., 2014; Naganna et al., 2017). 기존의 하천 수심조사는 real time kinematic-GPS 또는 Acoustic Doppler Current Profiler (ADCP)를 활용하여 수행되었는데, 이러한 직접 계측 방법은 시간과 인력이 많이 소요되기 때문에 넓은 지역에서의 연속적인 수심 계측에 어려움이 있다. 한편, 최근에는 원격탐사를 활용한 하천조사 기술이 많이 활용되고 있는데, 무인항공기(unmanned aerial vehicles [UAVs], drone)를 이용한 LiDAR나 Structure from Mode (SfM) 영상 측량 기술이 많이 활용되고 있다(McKean et al., 2014; Javernick et al., 2014; Tomsett and Leyland, 2019). LiDAR 기술은 레이저를 사용해 물의 깊이와 하상의 형태를 측정해 하상을 맵핑하는 데 효과적이다. 하지만 레이다는 단일 스펙트럼만 사용하기 때문에 다양한 하상재료의 하천에 적용하는 것은 한계가 있다. 반면 SfM 측량은 드론으로 촬영된 영상으로 고해상도 3D 지형 측정이 가능하나 물을 투과할 수 없기 때문에 하상측량은 어렵다는 한계가 있다. 분광센서(카메라)를 활용한 하천조사 기법 중에서는 초분광영상을 활용한 연구가 활발히 진행되고 있다(Al Najar et al., 2022; Fonstad and Marcus, 2005; Legleiter et al., 2019). Legleiter et al. (2009)은 수면에 의해 반사된 파장 λ에 대한 휘도 LT (λ)를 Eq. 1과 네 가지 요소로 나누어 표현하였다.
- Lb(λ)는 바닥에 의해 반사된 휘도, Lc(λ) 물기둥에 의해 흡수된 휘도, Ls(λ)는 수표면에서 반사된 휘도, Lp(λ)는 센서와 대기에 의해 감쇠되는 휘도이다. 이 중 수심과 관련된 요소는 바닥에 의해 반사된 휘도와 수표면에서 반사된 휘도이다. Lee et al. (1999)이 제시하였듯 측정 장비를 활용하여 직접 계측한 수심과 영상으로부터 얻은 스펙트럼 밴드 간의 회귀 방정식을 개발하여 수심 맵핑에 활용하였다. Legleiter et al. (2019)은 Optimal Band Ratio Analysis (OBRA) 알고리즘을 제안하여 수심에 가장 관련성 있는 스펙트럼 밴드비를 결정해 선형회귀식을 개발하였다. 한편, 최근에는 OBRA 기법을 개선하고자 수질농도, 하상재료 등에 따른 수심산정 기법을 구체화하는 연구들이 진행되고 있다(Gwon et al., 2023a; Gwon et al., 2023b; Gwon et al., 2023c; Kwon at al., 2023).
- 그러나 초분광영상은 100개 이상의 분광정보를 수집하기 때문에 약 15분간 드론 비행 시 약 50 GB 이상의 영상이 취득되며, 영상 취득 방식의 한계(push bloom, line scanning)로 지리참조 및 기하보정, 영상정합 등의 전처리 과정이 까다롭고 많은 시간이 소요된다. 한편, 10개 이하의 분광밴드로 이루어진 다분광영상은 분광해상도가 낮으므로 초분광영상에 비해 용량이 적고, 각각의 단일 밴드 영상으로 저장되기 때문에 line scanning이 아닌 area scanning 방식으로 운용이 가능하다. 따라서 다분광영상의 경우 기존 RGB 드론영상의 정합과 동일한 방법으로 자동정합 처리가 가능하다. 이러한 다분광영상은 정규식생지수(normalized difference vegetation index, NDVI)를 측정하거나 작물의 생육 상태를 분석하는 데 유용하기 때문에 특히 농업 및 산림 분야에서 널리 사용되고 있다.
- 본 연구에서는 자료의 용량이 경량화되어 있고, 다루기 편리한 다분광영상이 기존의 초분광영상을 활용한 수심맵 산정 기술의 방법론으로 수심 산정이 가능한지 평가하고자 하였다. 이를 위해 드론 다분광영상 수집, OBRA 기법을 활용한 수심맵 산정을 통해 다분광영상을 활용한 수심산정 기술의 오차(root mean squared error, RMSE)를 분석하였다. 또한, 영상에 기록되는 수체에서 반사되는 빛은 하상재료, 탁도, 수심에 따라 영향이 있으므로 상이한 조건에 따른 특성을 반영할 수 있도록 가우시안 혼합 모델을 이용한 군집분류를 통해 군집별로 수심맵을 각각 산정해 정확도를 평가하였다.
1. 서론
- 2.1 현장조사 방법
- 다분광영상 취득은 경기도 광주시 남종면에 위치한 팔당호에서 수행하였다(Fig. 1A). Fig. 1B에는 팔당호 현장에서 취득한 다분광영상과 계측한 수심 데이터를 함께 도시하였다. 팔당호는 남서쪽 삼성리 용마산으로부터 유입되는 수량에 포함된 상당량의 토사로 인해 유입부가 퇴적되어 낮은 지형을 형성하고 있어, 저수심부와 호소 특성의 고수심부가 함께 구성되어 연구 대상지로 설정하였다. 조사 지역의 면적은 약 18,520 m3로 조사 지역의 수심은 최저수심 0.03 m부터 최고수심 2.28 m까지로 조사되었으며, Fig. 1B에 0.25 m 간격으로 도시하였다. 드론영상(Fig. 1B)에서 육안으로 판단할 수 있듯이 조사 지역의 좌측은 남서쪽에서 유입되는 토사의 퇴적으로 인해 상당부분 퇴적이 진행되어 수심 1 m 이내로 낮은 지형을 형성하고 있고, 선박이 정박되어 있는 우측 지역은 1 m 이상의 깊은 지형을 형성하고 있다.
- 다분광센서는 특정 빛의 파장만 획득할 수 있는 특수 광학 필터로 구성된다. 본 연구에서는 하천원격탐사에 적합한 드론에 탑재된 다분광카메라로부터 다분광영상을 획득하였다. 사용된 드론은 DJI사의 Phantom 4 multispectral 모델(Fig. 2A; DJI, Nanshan, China; DJI, 2020)로 가시광 촬영용 RGB 센서 1개, 다중 스펙트럼 촬영용 모노크롬 센서 5개가 탑재되어 있다. 다중 스펙트럼 촬영 범위는 청색(blue band): 450±16 nm, 녹색(green band): 560±16 nm, 적색(red band): 650±16 nm, 적변(red edge [RE] band): 730±16 nm, 근적외선(near-infrared [NIR] band): 840±26 nm로 구성되었다(https://www.dji.com/kr/p4-multispectral/specs). 해당 드론은 전용 어플리케이션인 DJI GS PRO로 드론 운용 및 영상촬영이 가능하다(Fig. 2B). 본 연구에서는 드론 고도 100 m에서 6.0 m/s의 비행속도로 3,267.1 m의 경로를 지정해 237 지점에서 영상을 촬영하도록 미션을 설정하였으며, 이때 공간 해상도는 5.3 cm/pixel였다. 영상은 각 point에서 RGB 영상과 blue, green, red, RE, NIR가 각각 촬영되어 총 1,422장의 영상의 취득되었다.
- 획득한 영상을 이용해 수심을 산정하기 위해서는 실측 수심 데이터가 필요하다. 2.1.1절에서 서술하였듯, 연구 대상 지역은 최대 수심이 2.28 m까지 측정되었기 때문에 기본 수심 조사 방식으로 ADCP를 활용한 보트조사를 활용하였으며(Fig. 3A), 보트가 접근 불가능한 0.8 m 이하의 수심조사를 위해 RTK-GPS를 활용하였다(Fig. 3B). ADCP는 하상에 반사되는 초음파신호를 분석하여 수심을 측정하는 방법으로 이동식 보트에 탑재해 하천을 횡단하며 연속적인 수심 데이터를 취득할 수 있다. RTK-GPS는 측정지점의 위도, 경도 좌표와 표고값을 취득하여 하상의 형태를 구현하고, 수표면 표고값을 이용하여 수심을 산정할 수 있다. 취득한 수심자료는 Fig. 2B와 같으며, 득한 수심 데이터 중 80%는 수심식 도출을 위한 학습데이터로, 20%는 수심식 검증을 위한 데이터로 사용하였다.
- 2.2 수심산정 방법
- OBRA는 하천 수심에 관련된 분광정보를 찾고 회귀모형을 개발하는 데 가장 널리 사용되는 분석 방법이다(Gwon et al., 2023a; Kim et al., 2023; Legleiter et al., 2018; Niroumand-Jadidi et al., 2020; Niroumand-Jadidi et al., 2022; Visser et al., 2015; Zhao et al., 2021). OBRA에서는 두 밴드의 반사도비를 x로 정의하고 Eq. 2로 표현하며, 분광 파장대별로 가능한 모든 조합을 사용해 x를 산정한 후, x와 현장에서 측정한 수심 간의 결정계수(R2)를 산정하고, R2가 가장 높은 순서쌍을 찾아 수심식을 산정한다. 본 연구에서는 수심식을 Eq. 3와 같은 선형회귀식 형태로 산정하였다.
- R(λ1)는 임의의 파장 1에서의 반사도이며, R(λ2)는 임의의 파장 2에서의 반사도이다. a는 선형회귀모델의 기울기이며, b는 y절편이다.
- Gaussian mixture model (GMM) 기법은 가우시안 분포의 혼합을 사용하여 비가우시안 분포를 통계적으로 여러 개의 클러스터로 분할하는 확률적 클러스터링 방법이다(Kim et al, 2022; Zinger et al., 2013). GMM은 분산을 고려하여 늘어진 구조를 가진 데이터셋을 클러스터링할 수 있다. 또, 적합한 확률 밀도 함수(probability density function)는 각 클러스터에 속할 확률을 제공한다. 복잡한 수체 흡수 및 바닥반사도는 스펙트럼 변동성을 유발하며, GMM은 늘어진 구조의 데이터셋을 처리할 수 있기 때문에, 비가우시안 분포 모델링에 유리하다. GMM을 초분광영상에 활용해 군집분류를 수행하여 수심산정 결과를 개선하는 연구가 수행되었다(Kwon et al., 2023).
2. 연구 방법
2.1.1 연구 대상지
2.1.2 드론 다분광영상 획득
2.1.3 수심자료 수집
2.2.1 최적밴드 탐색 기법(OBRA)
2.2.2 군집화 기법
- 3.1 다분광영상 수집 결과
- 수집된 총 1,422장의 영상 중 다분광영상을 이루는 5개 밴드의 영상 1,185개를 각각의 밴드별로 영상정합 후 5개의 밴드를 중첩시켜 최종적으로 1개의 영상으로 합성하였다. 영상에는 빛의 세기가 정수형태의 digital number(DN)로 기록된다. DN값은 광원(태양)의 세기에 따라 다르게 기록되므로, DN을 반사도(reflectance)로 전환하는 방사보정을 수행하였다(Mustard et al., 2001). 본 연구에서는 표준 반사도 12%, 36%, 56%, 84%를 갖는 크기 1.2 m의 정방형 반사천 4개를 지상에 배치하여 방사보정을 수행하였다. 방사보정을 통해 최종적으로 제작된 다분광영상의 각각 밴드별 영상은 Fig. 4A-E와 같다. 수심 분석에 용이하도록 영상에서 수체 추출을 위해 Eq. 3의 normalized difference water index(NDWI; McFeeters, 1996)를 계산하였으며, 그 결과는 Fig. 4F와 같다.
- RGreen는 green 밴드의 반사도이며, RNIR은 NIR 밴드의 반사도이다.
- 3.2 군집분류 결과
- GMM 기법을 활용해 군집 수를 2개로 설정해 분류를 수행한 결과, Fig. 5A와 같은 결과가 도출되었으며, 다분광영상에서 추출한 반사도의 평균과 분산을 각 군집별로 표현한 분광 스펙트럼은 Fig. 5B, C와 같다. 군집분류 결과 RGB 영상에서 확인 가능한 퇴적 지형과 수심이 깊은 지역이 적절하게 분류되었다고 판단하였으며, 각 군집별 분광 스펙트럼 확인 결과 역시 군집별 분광정보 특성이 잘 반영된 것으로 판단하였다.
- Fig. 1B에 표출한 측정 결과 각각의 좌표와 수심, 계측장비, 분광정보 추출 결과와 군집분류 결과 일부를 Table 1에 나타내었다. 좌표계는 WGS 1984 UTM Zone 52N로 Point_X는 동, Point_Y는 북, Depth열은 수심으로 단위는 m이며, 수심을 측정한 장비는 Equip열에 작성하였다. 각 수심측정 위치에서 다분광영상의 반사도를 각 밴드별로 추출하여 6-10번째 열에 작성하였다. 또한 군집분류 결과도 Cluster 열에 기록하였다.
- 3.3 수심산정 결과
- 군집분류 후 수심산정 결과 비교를 위해서, 분류하지 않은 전체 수심 데이터셋을 이용해 수심산정을 수행하였다. 전체 데이터 205개 중 80%인 164개 지점의 반사도와 수심을 활용해 OBRA를 수행한 결과 분광밴드 순서쌍의 상관계수맵은 Fig. 6A로 도출되었다. 최적 밴드는 450 nm와 650 nm로 도출되었으며, 이 두 밴드의 반사도비를 활용하여 수심을 산정하였을 때 결정계수는 0.8529로 도출되었다. 밴드비와 수심의 관계는 Fig 6B와 같으며 도출된 수심식은 그래프 내부의 선형회귀식이다. 학습 데이터를 활용해 수심을 산정한 결과 평균 제곱근 편차(RMSE)는 0.2645 m로 나타났다(Fig. 6C). 검증용 데이터 41개의 반사도를 수심산정식에 대입해 수심을 산정한 결과, RMSE: 0.3216 m로 나타났다(Fig. 6D). 도출된 수심산정식(Fig. 6B)을 활용하여 영상 전체에 맵핑한 결과는 Fig. 6E와 같다.
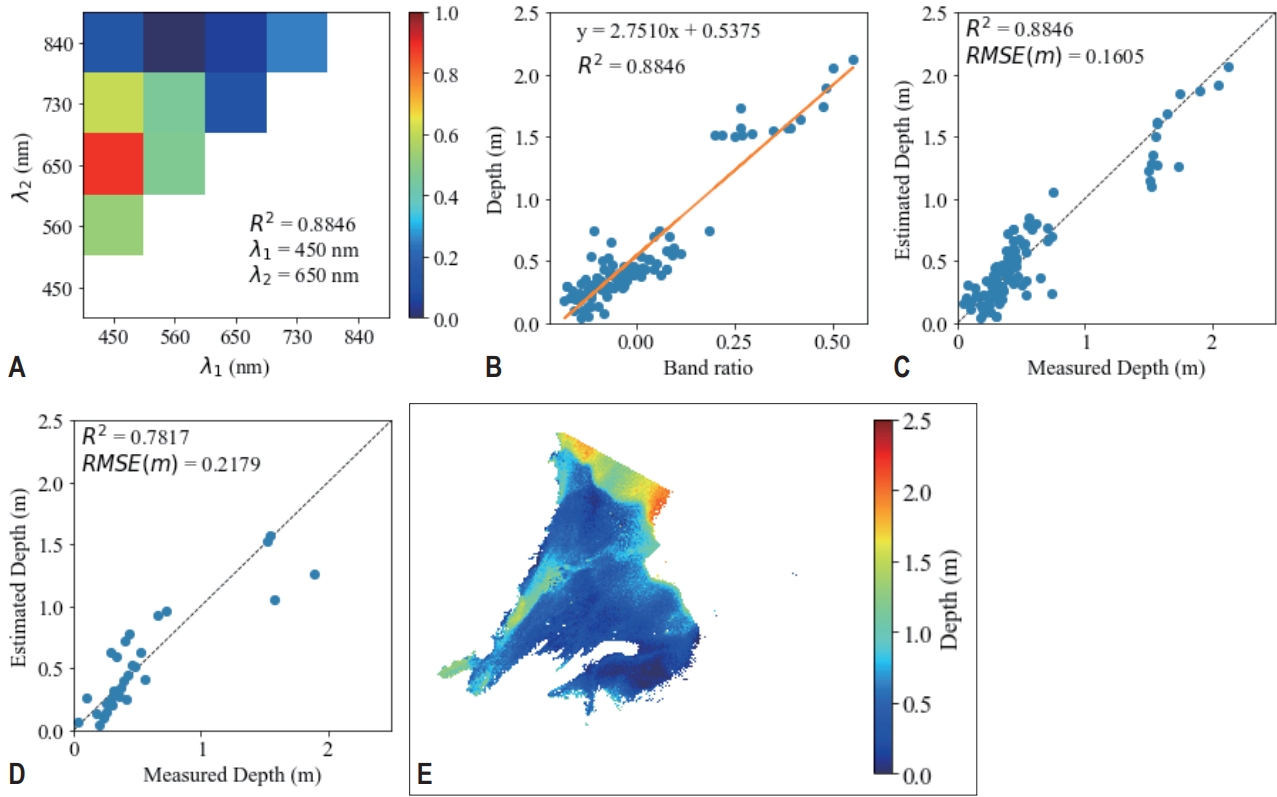
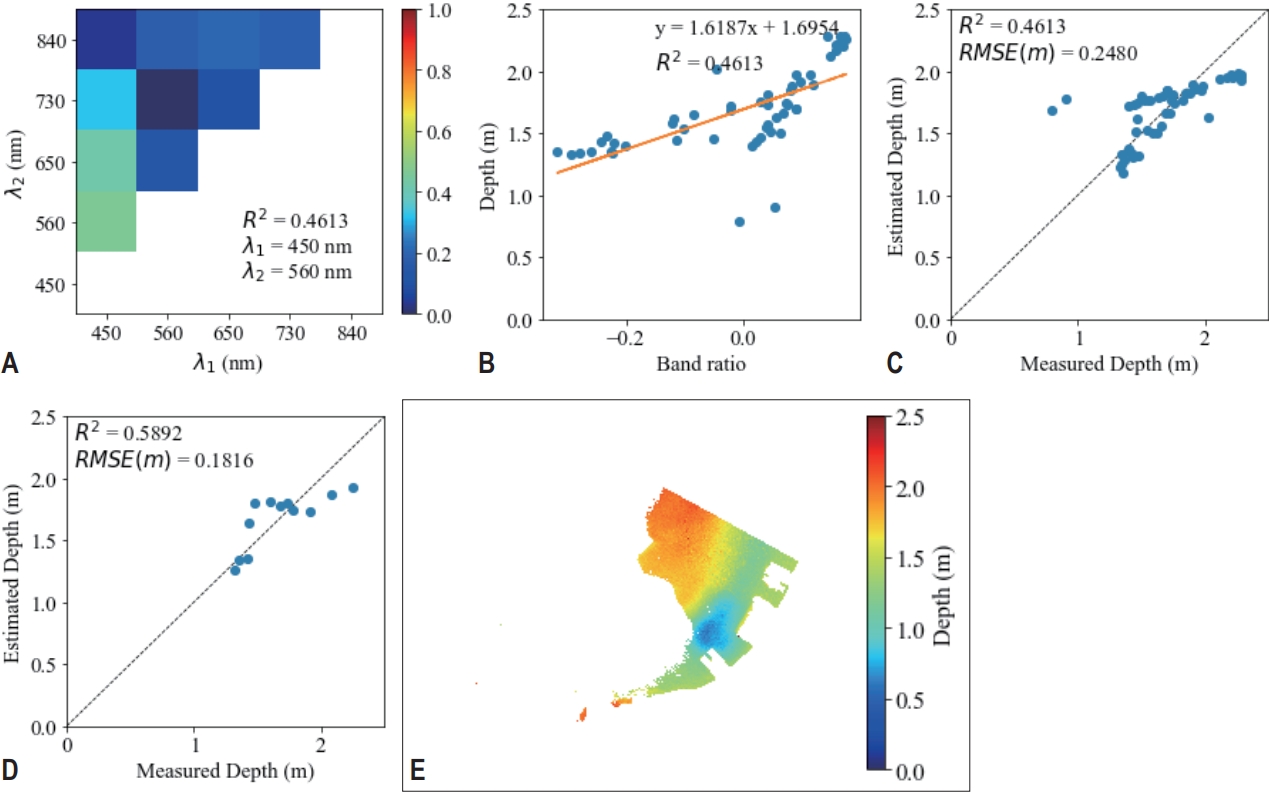
- 군집분류 후 수심산정은 군집별로 각각 OBRA를 수행하였다. 각 군집별 수심 분포를 보면(Figs. 7B, 8B) Cluster 1에는 저수심(1 m 이내) 데이터 전체와 고수심 데이터 일부가 포함되어 있고, Cluster 2에는 1 m 이상의 고수심 데이터가 주를 이루고 있지만 저수심 데이터 2개가 포함되어 있다. 각 군집별 OBRA 산정 결과는 Figs. 7A, B; Fig. 8A, B에 표출하였으며, Cluster 1의 경우 분류 전 OBRA 결과보다 R2값이 높게 나타났으며, Cluster 2의 경우 수심 경향을 크게 벗어나는 저수심 데이터 2개가 포함되어 R2값이 낮게 나타난 것으로 보인다.
- 군집분류 전 과 후 의 수 심맵을 비 교해보면(Fig. 9A, B) Cluster 1 영역에서는 군집분류 후 수심산정 결과가 군집분류 전보다 수심이 깊게 산정되었고, Cluster 2 영역에서는 군집분류 후 수심산정 결과가 군집분류 전보다 수심이 얕게 산정되었다(Fig. 9C). RMSE를 비교해보면(Table 2), 군집분류 후 Cluster 1과 2의 RMSE값이 군집분류 전보다 낮게 나타나 낮은 오차를 보였다.
3. 연구 결과
3.3.1 군집분류 전 수심산정
3.3.2 군집분류 후 수심산정
- 다분광영상을 활용한 수심산정 결과는 다음과 같이 요약할 수 있다.
- 1) 5개의 밴드를 가진 다분광영상으로 OBRA 기법을 이용해 수심산정이 가능하다. 일반적으로 수심과 상관관계를 갖는 파장영역이 정해져 있기 때문에, 해당 파장영역이 포함된 다분광영상으로 수심산정이 가능한 것으로 확인되었다. 또한, 수심산정 RMSE가 0.16-0.25 m로 선행연구들과 유사한 수준으로 도출되어 신뢰도 높은 결과를 도출했다고 판단된다.
- 2) 하천 수심 산정 시 지역적 특성을 반영한 분류를 통한 수심산정이 필요하다. 2.1.1절에서 서술한 연구 대상지의 특성으로는 선박을 정박하는 위치의 수심이 1 m 이상일 것으로 보였으나, 군집분류를 하지 않고 수행한 수심산정의 결과(Fig. 6) 해당 위치의 수심이 0.3 m 이내로 산정되어, 해당 지역에서는 부정확한 수심산정이 이루어졌다고 판단하였다. 군집분류 후 상대적으로 고수심부만 군집분류된 Cluster 2의 수심산정 결과(Fig. 8) 선박 정박지의 수심이 1 m 이상으로 도출되어 신뢰도 높은 수심산정이 이루어졌다고 판단하였다. 또한, 군집분류 전(Fig. 6)의 수심맵 산정 결과와 군집분류 후(Figs. 7, 8)의 수심산정을 비교한 결과 군집분류 후의 오차(RMSE)가 더 낮았기 때문에 영상을 기반으로 한 수심산정 시 군집별 수심산정을 통해 수심맵 정확도를 높일 필요가 있다.
- 3) 하천 수심 산정 시 수심범위별 분류를 통한 수심산정이 필요하다. 2)와 마찬가지로 3.3.2절에서 제시한 바와 같이 저수심부와 고수심부로 분류해 각각의 수심맵을 산정한 결과 낮은 오차를 보였다. 하지만 본 연구에서 군집분류 결과는 정확하게 저수심과 고수심 군집으로 분류되지 않고, Cluster 1에서 일부 고수심 데이터가 포함되었다. Fig. 7D의 계측 수심(measured depth)과 예측 수심(estimated depth)을 보면 고수심 데이터의 오차가 더 큰 것을 확인할 수 있다. 따라서 수심범위를 정확하게 분류하면 본 연구 결과보다 낮은 오차의 수심맵을 산정할 수 있을 것으로 판단된다.
- 4) 다분광영상을 활용한 수심산정 결과가 기존의 초분광 영상을 활용한 기법과 유사한 성능을 보이는지 정량적인 평가가 필요하다. 기존의 초분광영상을 활용한 수심산정 연구의 경우 100개 이상의 분광 밴드 데이터를 활용해 OBRA를 수행하였기 때문에 활용 가능한 최적 밴드의 범위가 넓었다(예를 들어 red 영역 620-780 nm에 약 30-40개의 분광 밴드가 있음). 하지만 본 연구의 다분광영상은 5개의 분광 밴드만 있기 때문에, 각 밴드별 단일 파장의 자료만 활용 가능하였다(red 영역 650±16 nm에서 하나의 분광 밴드 값만 있음). 따라서 다분광영상이 최적 밴드 도출 경우의 수가 적기 때문에 정확도 측면에서 낮은 결과가 도출되었을 것이라고 판단된다.
- 본 연구에서 수행한 드론 다분광영상을 활용한 수심산정은 원격탐사 기반으로 이루어져 기존의 점 단위 수심 산정을 면 단위 수심산정으로 수심 데이터의 공간 해상도를 확장할 수 있었다. 또한, 요약정리한 바와 같이 다분광영상을 활용해 기존의 전통적인 OBRA 기법을 활용해 산정한 수심이 초분광 영상을 활용한 선행 연구와 오차범위가 유사해 정확도 측면에서도 우수한 성능을 보였다. 하지만 수체에서 반사되는 빛은 수심뿐만 아니라 수중 부유물질, 조류, 용해물질 등과 같은 수질적 요인 등의 영향이 있으므로 향후 다양한 수환경에 따른 연구가 필요하다. 또한, 원격탐사를 통한 수심산정 선행 연구에서는 군집분류 결과 하상재료 기준으로 분류된 사례가 있었다(Kwon et al., 2023). 본 연구에서도 육안으로 판별이 가능한 수체 색깔 기준으로 군집분류가 수행되었기 때문에, 추가 연구를 진행하여 하상재료에 따른 군집분류를 통해 수심산정 정확도가 높아지는지 평가해볼 필요가 있다. 또한 초분광영상과 다분광영상의 공동 취득으로 다분광영상을 활용한 수심분석 기술이 초분광영상을 활용한 수심분석 기술과 유사한 정확도를 보이는지 비교할 예정이다. 본 연구는 드론을 기반으로 하여 좁은 영역의 수심산정을 수행하였지만, 추후 고해상도 위성영상에 적용할 경우 광범위한 지역의 수심맵 도출이 가능할 것으로 기대된다.
4. 요약 및 결론
-
Conflict of Interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
-
Funding Information
This work was supported by Korea Environment Industry & Technology Institute (KEITI) through R&D program for innovative flood protection technologies against climate crisis, funded by Korea Ministry of Environment (MOE) (RS-2023-00218973).
-
Data Availability Statement
The data that support the findings of this study are available on request from the corresponding author. The data are not publicly available due to privacy or ethical restrictions.
Notes







| Dataset | Bathymetry estimate Eq. | Training RMSE (m) | Validation RMSE (m) |
|---|---|---|---|
| All | y = 2.6967x + 0.5983 | 0.2645 | 0.3216 |
| Cluster 1 | y = 2.7510x + 0.5375 | 0.1605 | 0.2179 |
| Cluster 2 | y = 1.6187x + 1.6954 | 0.2480 | 0.1816 |
- Al Najar M, Benshila R, El Bennioui Y, et al (2022) Coastal bathymetry estimation from Sentinel-2 satellite imagery: comparing deep learning and physics-based approaches. Remote Sens 14(5):1196Article
- Dekker AG, Phinn SR, Anstee J, et al (2011) Intercomparison of shallow water bathymetry, hydro-optics, and benthos mapping techniques in Australian and Caribbean coastal environments. Limnol Oceanogr-Meth 9(9):396–425Article
- DJI (2020) Phantom 4 multispectral specifications. DJI https://www.dji.com/kr/p4-multispectral/specs Accessed 31 Aug 2023
- Fonstad MA, Marcus WA (2005) Remote sensing of stream depths with hydraulically assisted bathymetry (HAB) models. Geomorphology 72(1-4):320–339Article
- Gwon Y, Kim D, You H (2023a) Evaluation for applicability of river depth measurement method depending on vegetation effect using drone-based spatial-temporal hyperspectral image. J Korea Water Resour Assoc 56(4):235–243
- Gwon Y, Kim D, You H, Nam S, Kim Y (2023b) A standardized procedure to build a spectral library for hazardous chemicals mixed in river flow using hyperspectral image. Remote Sens 15(2):477Article
- Gwon Y, Kwon S, Kim D, Seo IW, You H (2023c) Estimation of shallow stream bathymetry under varying suspended sediment concentrations and compositions using hyperspectral imagery. Geomorphology 133:108722Article
- Javernick L, Brasington J, Caruso B (2014) Modeling the topography of shallow braided rivers using structure-frommotion photogrammetry. Geomorphology 213:166–182Article
- Kim D, Seo Y, You H, Gwon Y (2023) Performance evaluation of hyperspectral bathymetry method for morphological mapping in a large river confluence. J Korea Water Resour Assoc 56(3):195–210
- Kim J, Gwon Y, Park Y, et al (2022) A study on the analysis of current status of Seonakdong river algae using hyperspectral imaging. J Korea Water Resour Assoc 55(4):301–308
- Kwon S, Gwon Y, Kim D, Seo IW, You H (2023) Unsupervised classification of riverbed types for bathymetry mapping in shallow rivers using UAV-based hyperspectral imagery. Remote Sens 15(11):2803Article
- Lee CH, Liu LW, Wang YM, Leu JM, Chen CL (2022) Drone-based bathymetry modeling for mountainous shallow rivers in Taiwan using machine learning. Remote Sens 14(14):3343Article
- Lee Z, Carder KL, Mobley CD, Steward RG, Patch JS (1999) Hyperspectral remote sensing for shallow waters: 2 deriving bottom depths and water properties by optimization. Appl Opt 38(18):3831ArticlePubMed
- Legleiter CJ, Harrison LR (2019) Remote sensing of river bathymetry: evaluating a range of sensors, platforms, and algorithms on the upper Sacramento river, California, USA. Water Resour Res 55(3):2142–2169ArticlePDF
- Legleiter CJ, Overstreet BT, Kinzel PJ (2018) Sampling strategies to improve passive optical remote sensing of river bathymetry. Remote Sens 10(6):935Article
- Legleiter CJ, Roberts DA, Lawrence RL (2009) Spectrally based remote sensing of river bathymetry. Earth Surf Process Landf 34(8):1039–1059Article
- Mallick J, Hasan MA, Alashker Y, Ahmed M (2014) Bathymetric and geochemical analysis of lake Al-Saad, Abha, Kingdom of Saudi Arabia using geoinformatics technology. J Geogr Inf Syst 6(5):440–452ArticlePDF
- McFeeters SK (1996) The use of the normalized difference water index (NDWI) in the delineation of open water features. Int J Remote Sens 17(7):1425–1432Article
- McKean J, Tonina D, Bohn C, Wright CW (2014) Effects of bathymetric lidar errors on flow properties predicted with a multidimensional hydraulic model. J Geophys Res Earth Surf 119(3):644–664Article
- Mustard JF, Staid MI, Fripp WJ (2001) A semianalytical approach to the calibration of AVIRIS data to reflectance over water: application in a temperate estuary. Remote Sens Environ 75(3):335–349
- Naganna SR, Deka PC, Ch S, Hansen WF (2017) Factors influencing streambed hydraulic conductivity and their implications on stream–aquifer interaction: a conceptual review. Environ Sci Pollut Res 24:24765–24789ArticlePDF
- Niroumand-Jadidi M, Bovolo F, Bruzzone L (2020) SMART-SDB: sample-specific multiple band ratio technique for satellitederived bathymetry. Remote Sens Environ 251:112091Article
- Niroumand-Jadidi M, Legleiter CJ, Bovolo F (2022) Bathymetry retrieval from CubeSat image sequences with short time lags. Int J Appl Earth Obs Geoinf 112:102958Article
- Tomsett C, Leyland J (2019) Remote sensing of river corridors: a review of current trends and future directions. River Res Appl 35(7):779–803ArticlePDF
- Visser F, Buis K, Verschoren V, Meire P (2015) Depth estimation of submerged aquatic vegetation in clear water streams using low-altitude optical remote sensing. Sensors 15(10):25287–25312ArticlePubMedPMC
- Zhao D, Arshad M, Li N, Triantafilis J (2021) Predicting soil physical and chemical properties using vis-NIR in Australian cotton areas. Catena 196:104938Article
- Zinger JA, Rhoads BL, Best JL, Johnson KK (2013) Flow structure and channel morphodynamics of meander bend chute cutoffs: a case study of the Wabash river, USA. J Geophys Res Earth Surf 118(4):2468–2487Article
References
Appendix
| Sort | Field | Subcategory#1 | Subcategory#2 |
|---|---|---|---|
| Essential | *Title | Depth and Multispectral Image Reflectance of Paldang Lake | |
| *DOI name | https://doi.org/10.22761/GD.2023.0033 | ||
| *Category | Remote sensing | ||
| Abstract | |||
| *Temporal Coverage | 27-Apr-23 | ||
| *Spatial Coverage | In Korea | ||
| WGS 1984 UTM Zone 52N | |||
| X: 348,436.213 E 348,683.713 E | |||
| Y: 4,150,524.311 N to 4,150,324.111 N | |||
| *Personnel | Name | Dongsu Kim | |
| Affiliation | Dankook University | ||
| dongsu-kim@dankook.ac.kr | |||
| *CC License | CC BY-NC | ||
| Optional | *Project | R&D program for innovative flood protection technologies against climate crisis | |
| *Instrument | None |
Figure & Data
References
Citations
 PubReader
PubReader ePub Link
ePub Link Cite
Cite









#816, 8-13, Gwangpyeong-ro 56-gil, Gangnam-gu, 06367 Seoul, South Korea
Tel: +82-2-6677-5682 E-mail: geodata@gaidas.org
Corporate registration number: 780-82-00418
